py_eddy_tracker.dataset.grid.GridDataset¶
- class py_eddy_tracker.dataset.grid.GridDataset(filename, x_name, y_name, centered=None, indexs=None, unset=False, nan_masking=False)[source]¶
Bases:
objectClass for basic tools on NetCDF Grid
- Parameters:
filename (str) – Filename to load
x_name (str) – Name of longitude coordinates
y_name (str) – Name of latitude coordinates
centered (bool,None) – Allow to know how coordinates could be used with pixel
indexs (dict) – A dictionary that sets indexes to use for non-coordinate dimensions
unset (bool) – Set to True to create an empty grid object without file
nan_masking (bool) – Set to True to replace data.mask with isnan method result
Methods
Add a grid in handler
Centered coordinates to bounds coordinates
Duplicate the variable from grid_in in grid_out
Compute eddy identification on the specified grid
Compute geostrophic speed around successive contours Returns the average
Give the grid required
Give the grid tiles required, without buffer system
Return the high-pass filtered grid, by substracting to the initial grid the low-pass filtered grid (default: order=1)
Check grid circularity
Load variable (data).
Load attrs to be stored in object
Return the low-pass filtered grid (default: order=1)
Get unit from variable
Write dataset output with same format as input
Attributes
Give bounds
Give True if pixel is described with its center's position or a corner
- EARTH_RADIUS = 6370997.0¶
- GRAVITY = 9.807¶
- N = 1¶
- add_grid(varname, grid)[source]¶
Add a grid in handler
- Parameters:
varname (str) – name of the future grid
grid (array) – grid array
- property bounds¶
Give bounds
- static c_to_bounds(c)[source]¶
Centered coordinates to bounds coordinates
- Parameters:
c (array) – centered coordinates to translate
- Returns:
bounds coordinates
- centered¶
- contours¶
- coordinates¶
- copy(grid_in, grid_out)[source]¶
Duplicate the variable from grid_in in grid_out
- Parameters:
grid_in
grid_out
- dimensions¶
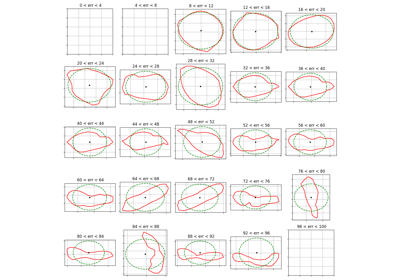
- eddy_identification(grid_height, uname, vname, date, step=0.005, shape_error=55, presampling_multiplier=10, sampling=50, sampling_method='visvalingam', pixel_limit=None, precision=None, force_height_unit=None, force_speed_unit=None, **kwargs)[source]¶
Compute eddy identification on the specified grid
- Parameters:
grid_height (str) – Grid name of Sea Surface Height
uname (str) – Grid name of u speed component
vname (str) – Grid name of v speed component
date (datetime.datetime) – Date to be stored in object to date data
shape_error (float,int) – Maximal error allowed for outermost contour in %
presampling_multiplier (int) – Evenly oversample the initial number of points in the contour by nb_pts x presampling_multiplier to fit circles
sampling (int) – Number of points to store contours and speed profile
sampling_method (str) – Method to resample the stored contours, ‘uniform’ or ‘visvalingam’
pixel_limit ((int,int),None) – Min and max number of pixels inside the inner and the outermost contour to be considered as an eddy
precision (float,None) – Truncate values at the defined precision in m
force_height_unit (str) – Unit used for height unit
force_speed_unit (str) – Unit used for speed unit
kwargs (dict) – Arguments given to amplitude (mle, nb_step_min, nb_step_to_be_mle). Look at
py_eddy_tracker.eddy_feature.Amplitude()The amplitude threshold is given by step*nb_step_min
- Returns:
Return a list of 2 elements: Anticyclones and Cyclones
- Return type:
- filename¶
- static get_amplitude(contour, contour_height, data, anticyclonic_search=True, level=None, **kwargs)[source]¶
- get_uavg(all_contours, centlon_e, centlat_e, original_contour, anticyclonic_search, level_start, pixel_min=3)[source]¶
Compute geostrophic speed around successive contours Returns the average
- global_attrs¶
- grid(varname, indexs=None)[source]¶
Give the grid required
- Parameters:
- Returns:
array asked, reduced by the indexes
- Return type:
array
- high_filter(grid_name, w_cut, **kwargs)[source]¶
Return the high-pass filtered grid, by substracting to the initial grid the low-pass filtered grid (default: order=1)
- Parameters:
grid_name – the name of the grid
w_cut (int,) – the half-power wavelength cutoff (km)
- indexs¶
- property is_centered¶
Give True if pixel is described with its center’s position or a corner
- Returns:
True if centered
- Return type:
- low_filter(grid_name, w_cut, **kwargs)[source]¶
Return the low-pass filtered grid (default: order=1)
- Parameters:
grid_name – the name of the grid
w_cut (int,) – the half-power wavelength cutoff (km)
- nan_mask¶
- property variables¶
- variables_description¶
- vars¶
- write(filename)[source]¶
Write dataset output with same format as input
- Parameters:
filename (str) – filename used to save the grid
- x_bounds¶
- x_c¶
- x_dim¶
- y_bounds¶
- y_c¶
- y_dim¶